Exponential Technology and the Self-Driving Car
David Rostcheck / Op Ed
Posted on: October 13, 2015 / Last Modified: September 6, 2022
On a crisp autumn day, two sleek Mercedes sedans smoothly joined the flow of traffic on French Autoroute 1 near Paris’ Charles de Gaulle airport. For hours the two vehicles drove along the highway in heavy traffic, passing other cars when necessary. Although no obvious signs distinguished them as unique, close observation would reveal that both were autonomous vehicles, driving themselves with human-level competency.
Self-driving vehicle technology is now beginning to establish itself in the market. Major automakers like Volkswagen have been quietly shipping driverless technologies in new production vehicles. Tesla Motors nears completion on a promised software update that will enable autopilot mode. But the two Mercedes in question – VAMP and VITA-2 – are not current production models, nor are they current research vehicles. Today they sit in a museum in Bonn, Germany, because the above drive happened in 1994 – over 20 years ago. We will use the surprisingly old story of the development of the self-driving car to illustrate an often-overlooked aspect of the development of enormously successful technologies – they can take a long time to become an “overnight success.” Such exponential technologies reach a point where they suddenly burst forth into the public eye. We call this point the “knee of the curve,” where the exponential goes from doubling small numbers to produce more small numbers, to doubling more substantial numbers that quickly become huge. Public attention understandably focuses on the breakout and scaling of advanced technologies. But reaching the breakout point requires building the necessary base, which can take a long time – much longer than people often realize.
Scientists had worked on the problem of self-driving cars for decades. Research pioneers produced crude driverless cars during the 1950s – but these early systems required help from modified roads. General Motors and RCA demonstrated an early system that used embedded cables in the roadways, tracked by magnets. This technology was never deployed due to the expense and difficulty of redesigning roads.
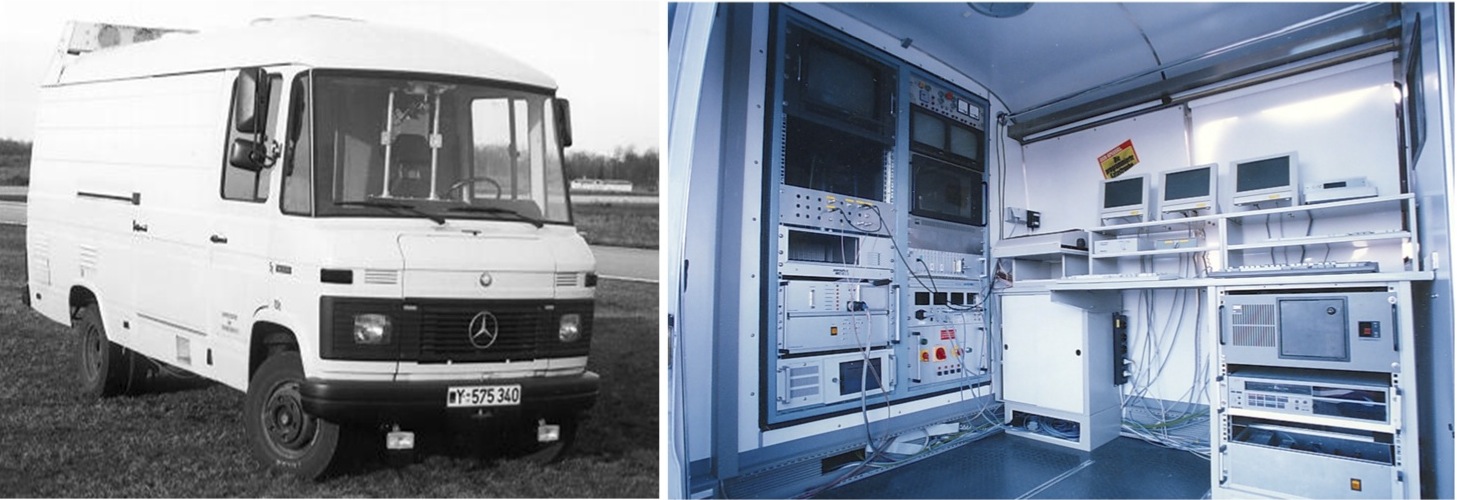
A new approach was needed. Enter Ernest Dickmanns, a German aerospace researcher. Dr. Dickmanns had, after work with NASA on orbiter re-entry in the 1970’s, returned to academia and started an institute to apply machine vision techniques to create autonomous vehicles. His team retrofitted a large Mercedes-Benz Vario motor coach – chosen because its huge volume could house the necessary computer equipment – and used it as a testbed for self-driving technology. As technology improved, the physical space needed shrank.
It wasn’t until 1986 that nations began to take autonomous vehicles seriously. That year, the intergovernmental research center EUREKA launched the “PROgraMme for a European Traffic of Highest Efficiency and Unprecedented Safety” (PROMETHEUS), a well-funded major initiative to improve the physical architecture of European roadways to improve safety. Their original intent was to deploy guide cables in European highways – but Dr. Dickmanns changed their minds with VaMoRs, a 5-ton Mercedes van that could truly drive itself. On a closed test track, it performed reliably, mastering fully autonomous driving at up to 96 km/hr (60 mph).
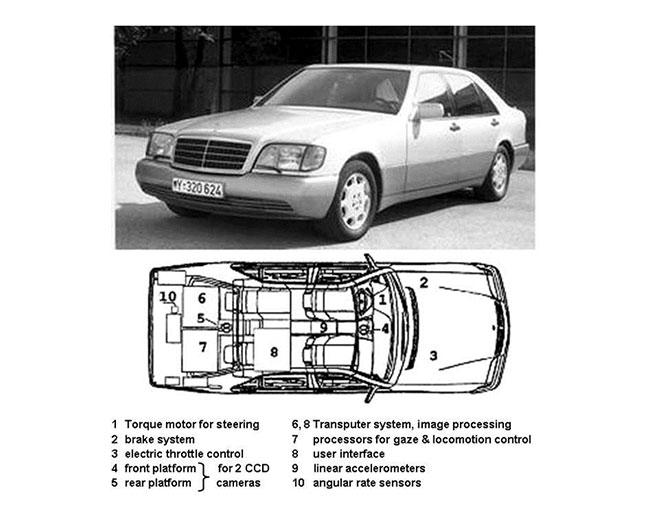
Dickmanns used his team’s share of the PROMETHEUS funds to develop VAMP and VITA-2. These highly refined third-generation research cars looked like ordinary Mercedes sedans, but could drive autonomously. The capstone test drive along Autoroute 1 was followed the next year by a demonstration run from Munich to Denmark and back. This drive included parts of the Autobahn, where the self-driving car performed safely while handling lane changes and passing other vehicles at speeds of 75 mph (roughly 110 km/h). Their demonstration proved conclusively that the team had solved all the important problems necessary for cars to drive themselves at the equivalent of human skill level on highways.
So if we had highway autopilot functionality in 1994, why did it take twenty years for this technology to appear in commercial vehicles?
There are three main reasons.
- Existing manufacturers change slowly: The design-to-production time for automobiles is several years, and was longer in the past. Each new model represents a major project, with a long supply chain of vendors all building custom tooling to make the parts needed to make the subassemblies needed to build the vehicle. If designers incorporate a new feature today, that feature will not reach the showroom for several years.
- Regulation and liability slow deployment: Self-driving cars equalled human drivers more than 20 years ago. But automobiles inevitably get into accidents, and accidents cause lawsuits. Automakers chose to iterate on the technology until the autonomous cars’ driving level had reached a point well above human norms. This insured that in any accident involving a human-driven car, the automated vehicle would inevitably be a provably better driver – a superior stance for legal defense. Although a self-driving vehicle can operate perfectly well using just cameras and basic sensors, modern systems also include LIDAR and other advanced sensors, giving them better perception than human drivers.
- Auto manufacturers were waiting for the cost to drop: Since the research to develop the algorithms was done long ago, the cost of self-driving control systems is mostly information technology components like sensors and computers. We often think innovations move directly from the lab to the market, but in reality it is not uncommon for them to languish in limbo waiting for the prices of key technologies to fall. Ray Kurzweil‘s career as a futurist began in his attempts, as a professional inventor, to confront this issue systematically. It is unprofitable for an inventor to develop inventions that must wait many years for the components to drop to an acceptable price. To be able to time his inventions better, he began studying what levels of technology would be needed and trying to predict when the technology curve would reach that point.
What has happened in the intervening 20 years since Dickmanns’ Autobahn demo?
PROMETHEUS ended in 1995, but it was followed by a series of European projects. In 1998, the Italian project ARGO built a self-driving car that drove 2,000 km on Italian public roads in real traffic conditions, using two black-and-white cameras and a Pentium PC running Linux. In 2006 – building on its extensive in-house expertise from PROMETHEUS – Volkswagen demoed a self-driving Golf research race car that could out-perform human drivers. And in 2010, an Italian convoy of four autonomous solar-powered automobiles drove from Parma, Italy to Shanghai, China – a three month long 16,000 km trip.
In the United States the defense research arm of the government, known as DARPA, sponsored its first Grand Challenge desert race in 2004. Although it is not obvious, driving autonomously off-road is much more difficult than navigating highways, since a highway is already an artificial, highly structured environment – perfect for robots. Once the self-driving cars proved their mastery of desert terrain, DARPA changed the venue for its Grand Challenge to an urban course. In 2007, contestants in the Urban Challenge demonstrated excellent autonomous driving skills dealing with traffic. Two years later, Google began its famous self-driving car program.
Meanwhile automakers began rolling out limited autopilot technologies – self-parking, lane keeping assist, automated braking, and “advanced highway cruise control.” Most of these technologies allow the automobile to quietly mitigate the driver’s lack of attention or skill. Toyota now ships eight separate vehicle “active safety” systems that rely on autonomous driving technology. Mercedes 2014 S-class sedans offer a “stop and go traffic autopilot” mode in which the vehicle can drive itself.
Almost four decades later, we approach the breakthrough of autonomous vehicles. These cars are quietly taking over – hidden in plain sight – and are now far superior drivers to humans. That should not be surprising, since they mastered highway driving decades ago.
The long early part of the exponential can be long indeed.
About the Author:
 David Rostcheck is a consulting data scientist helping companies tackle challenging problems and develop advanced technology. He can be reached at drostcheck [at] leopardllc.com.
David Rostcheck is a consulting data scientist helping companies tackle challenging problems and develop advanced technology. He can be reached at drostcheck [at] leopardllc.com.







